Continuing the discussion from Scorbot-ER VII Robot Arm:
To recap the extremely sporadic efforts of getting our industrial robot arm working:
- @funvill brought it in via friends as a donation to VHS, no strings attached (woo)
- We have a manual! Digital copy in the linked thread, physical copy next to the control box
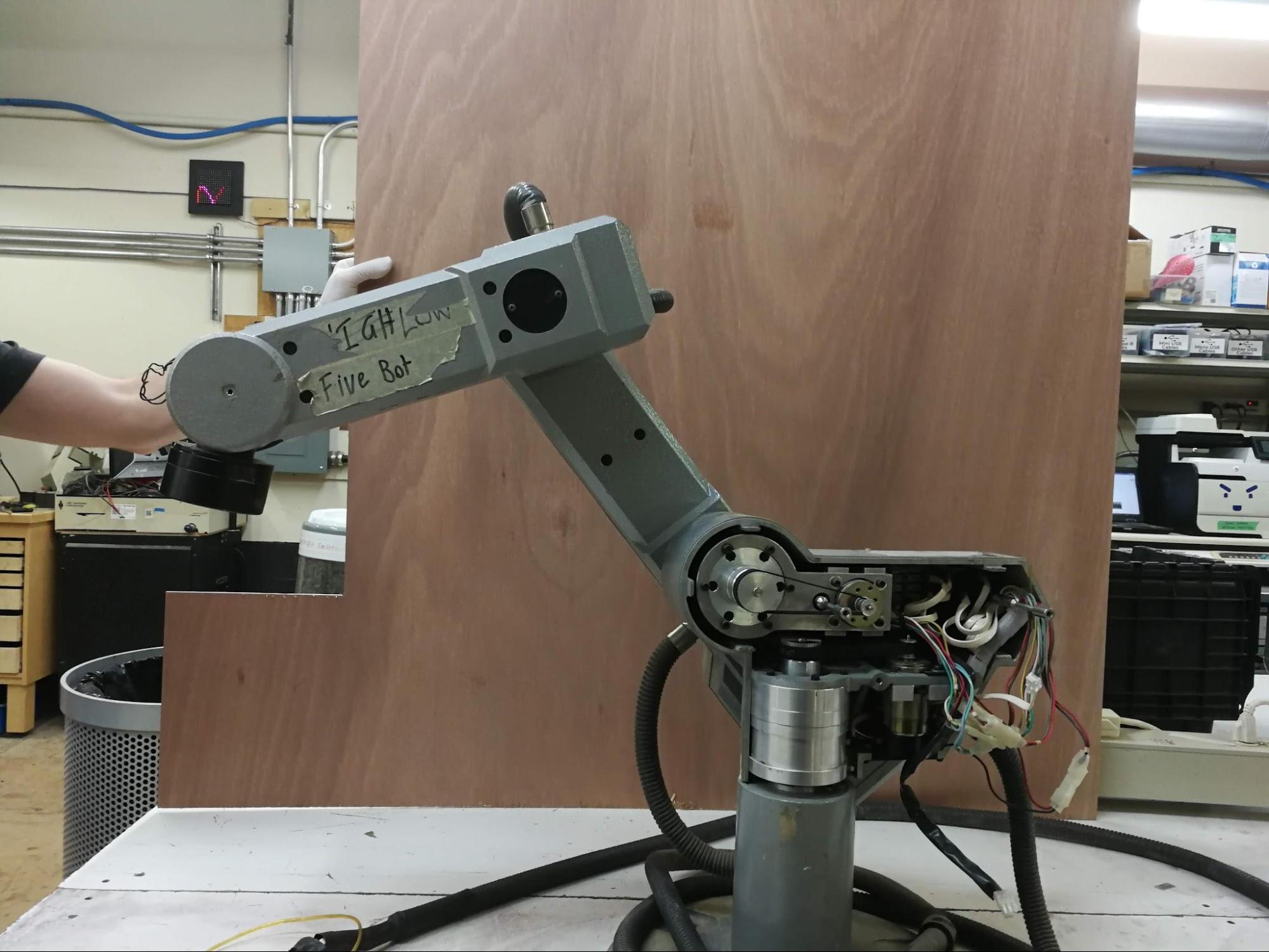
- It got turned into the High-Five Bot, the official door greeter of VHS

- It got turned into the Low-Five Bot
- @KazW got it moving directly at the joints with discrete drivers
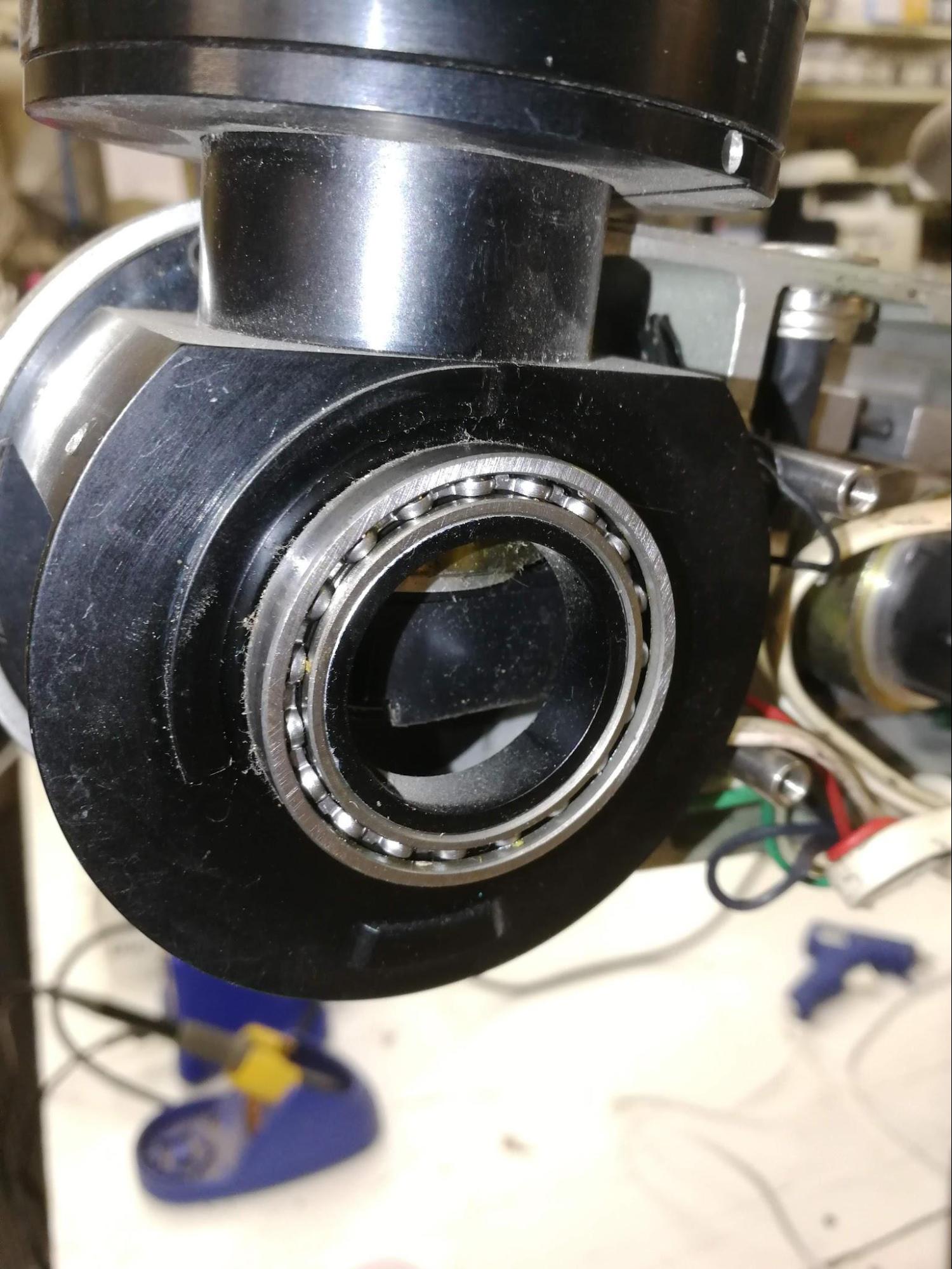
- And then this happened:


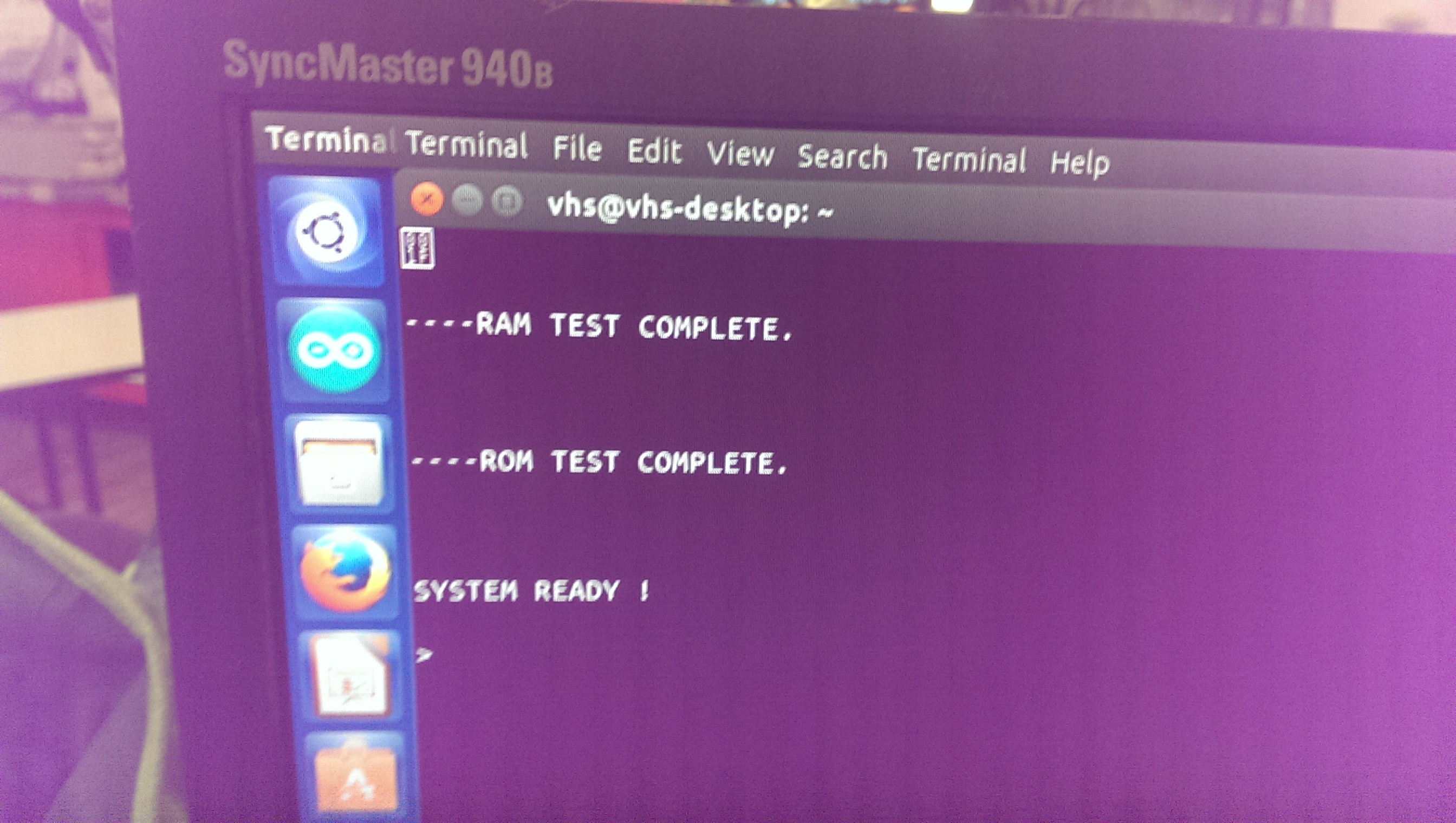
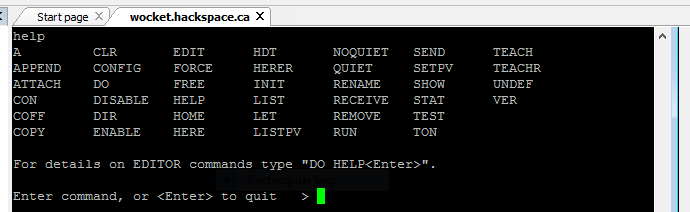
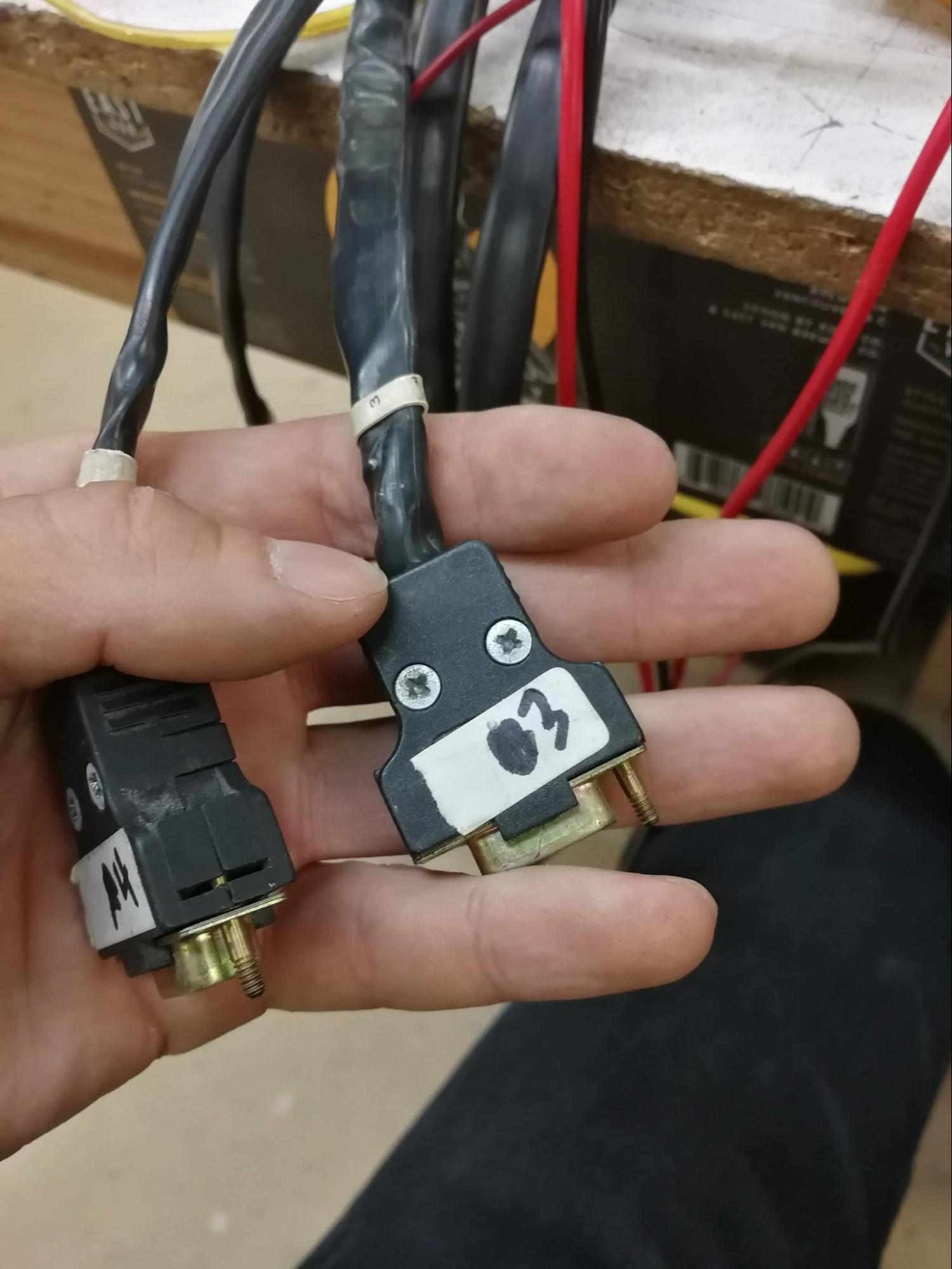
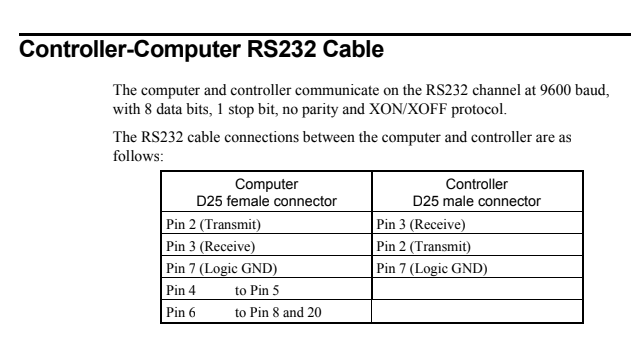
I found a serial connection in the driver, desoldered the connector, and spliced in a proper DB9 serial cable. Then it worked fine with a USB-Serial dongle. Problem is, I did this in January and I don’t remember the settings!
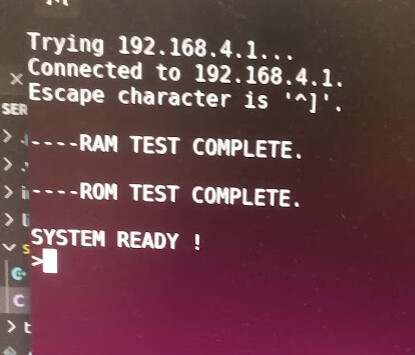
The factory interface a pretty simple command prompt, poorly documented in the manual. “HOME ALL” seems to work, and by that I mean it causes the robot arm to repeatedly slam itself against the table and scare the hell out of everyone in the room.
So I was back at it yesterday, with two goals: Figure out the limit switches, and connect it to the internet. I failed at both, but here’s where I got.
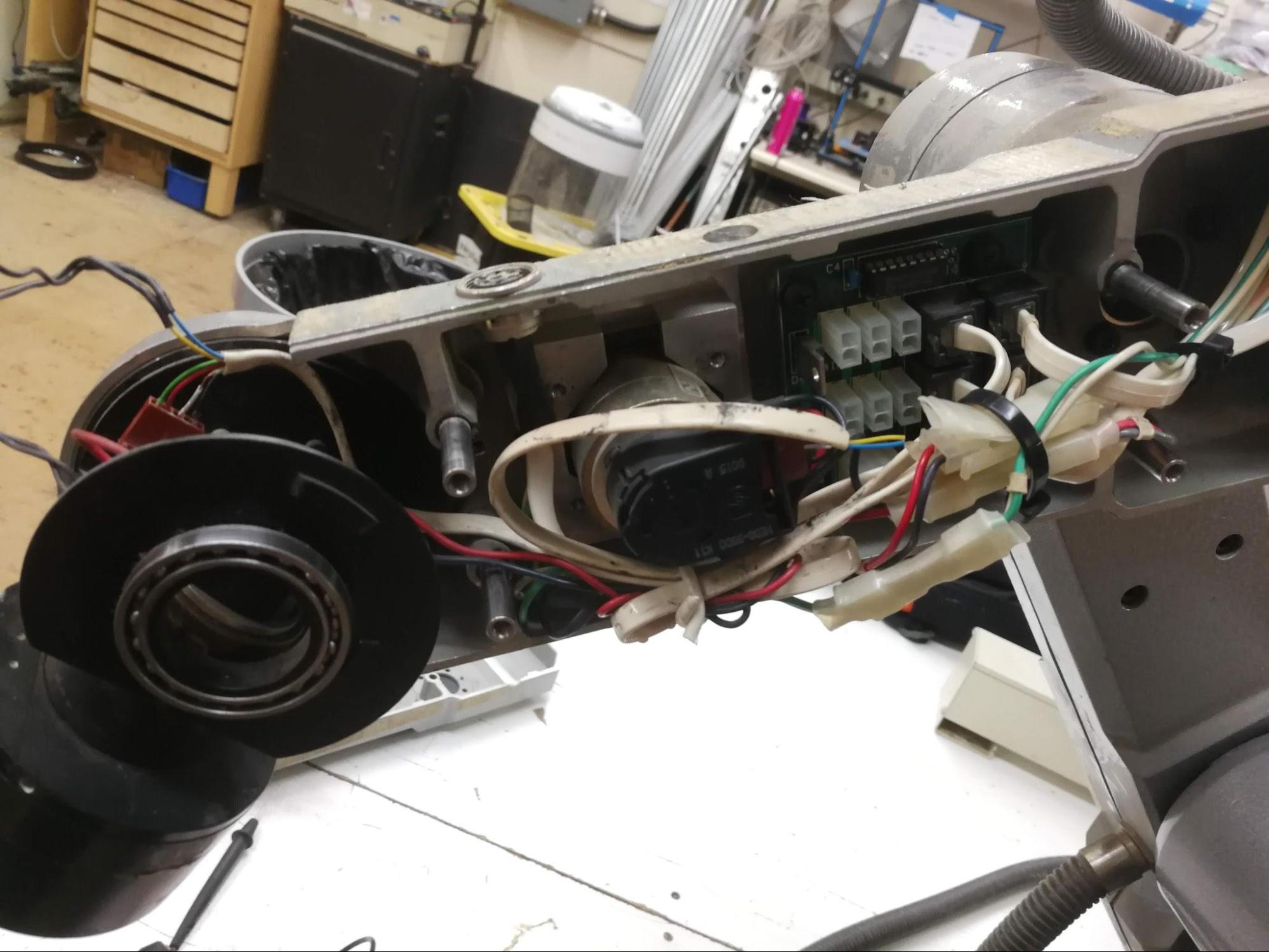
To start with, this is what the controller looks like inside, in all its 80s glory.
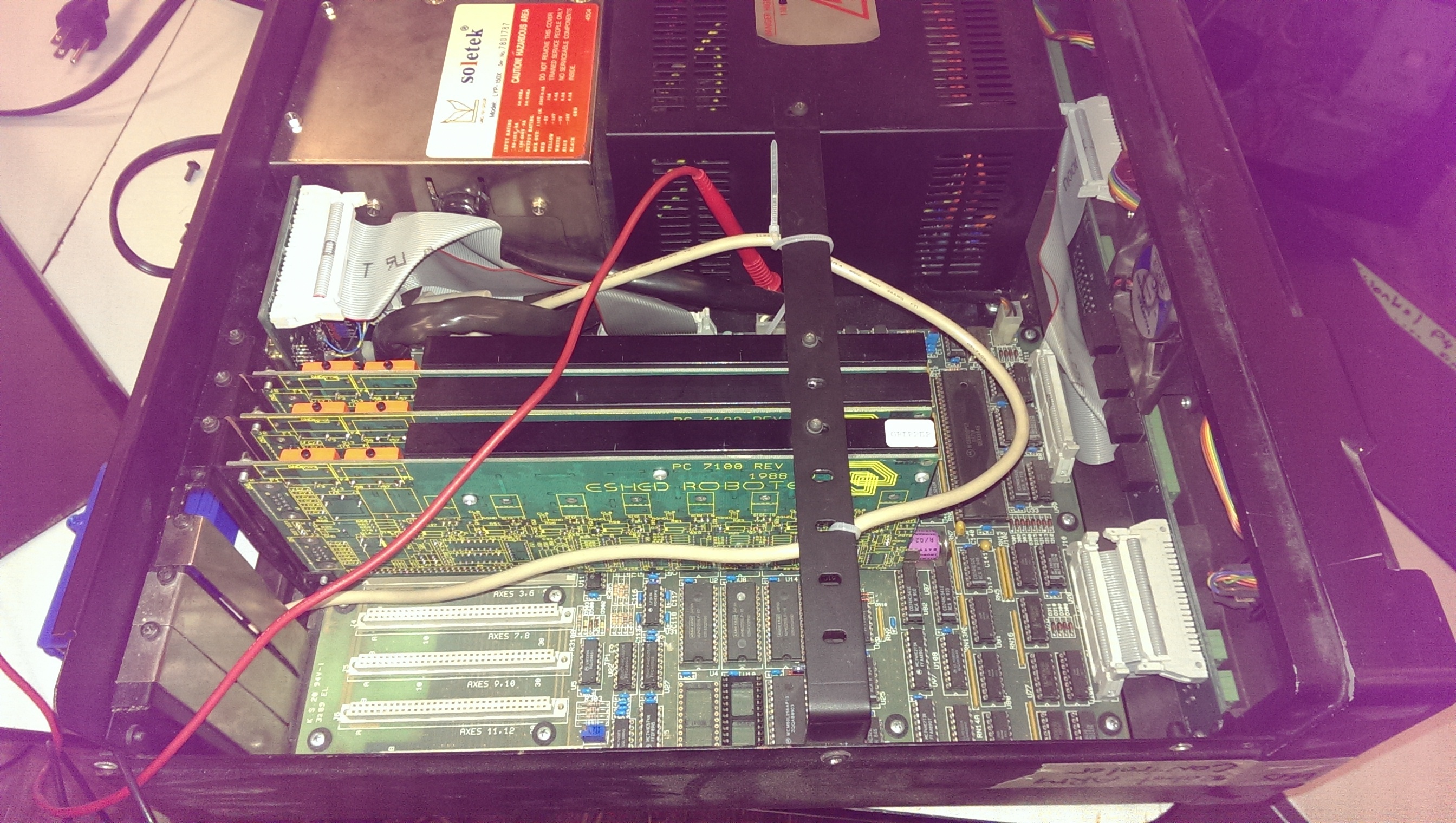
Despite the appearance from the outside, this isn’t a computer in the modern sense of the word at all. You can see the main board on the bottom, all through hole parts, with a huge 6801 microcontroller up in the top right. The majority of the space is taken up by the beefy power supplies in the top, and you can see the expansion cards for each of the robot arm axis with the 1988 copyright year.
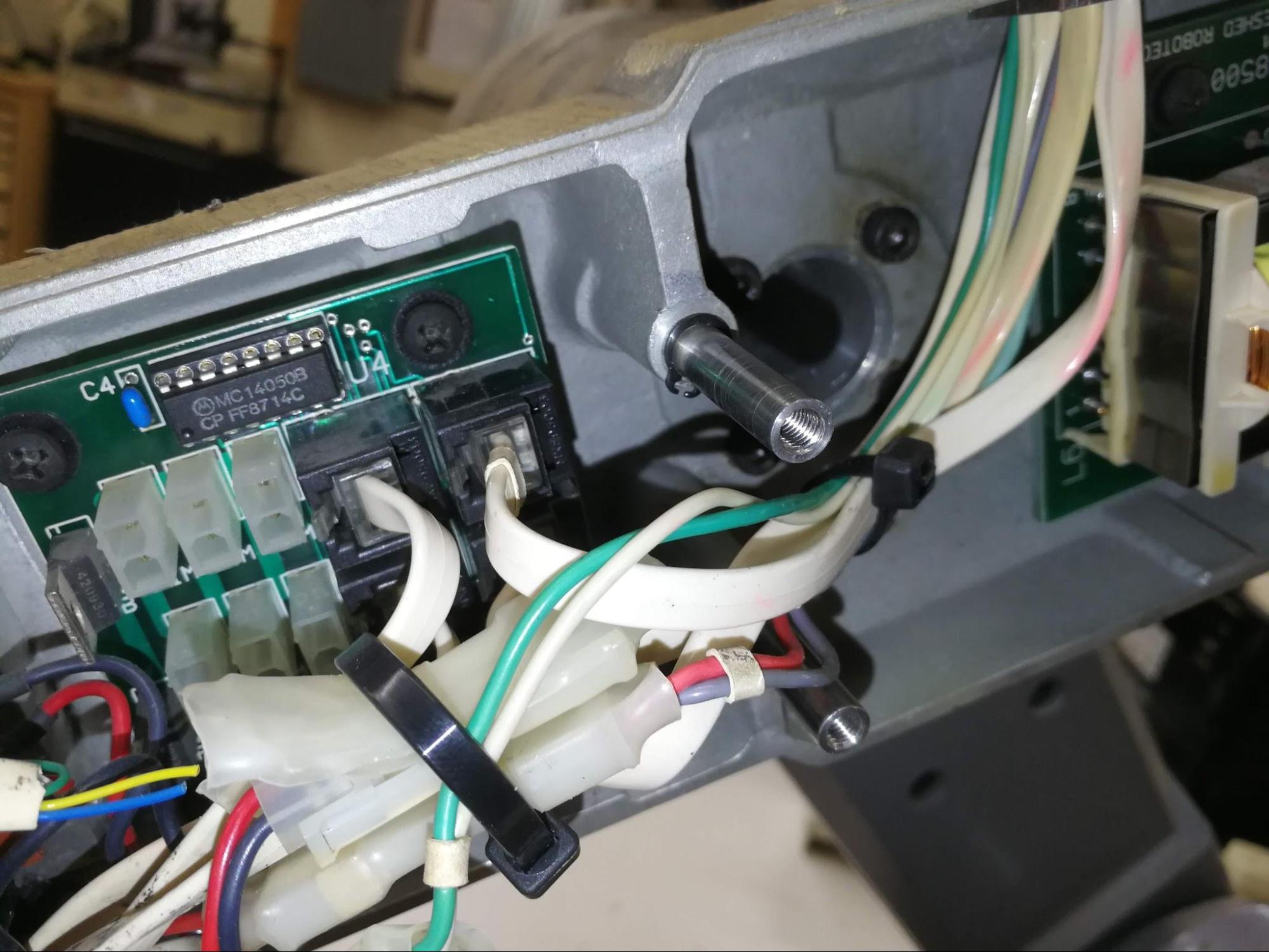
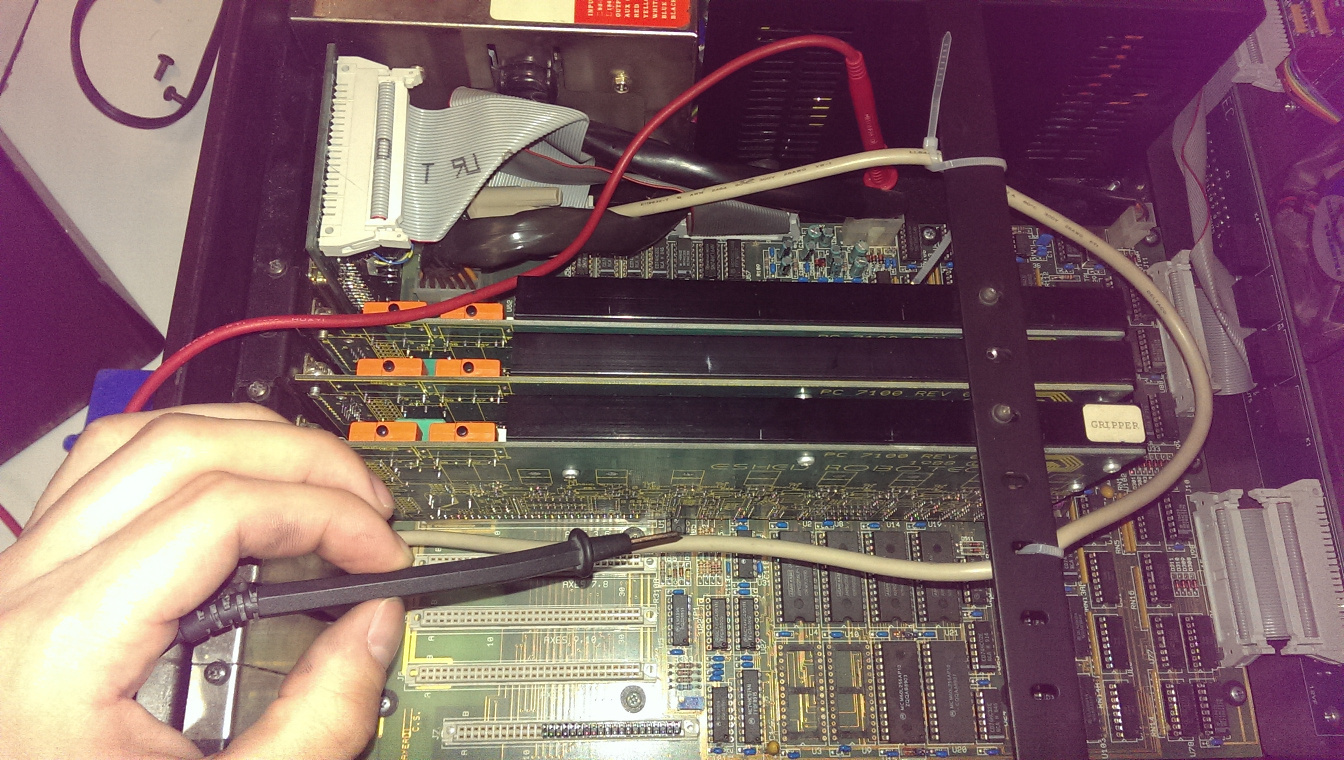
The first step was to find a 5v power rail. Using a sophisticated technique I developed - Reading the label - I was able to find the 5v wires going into the main board from the main power supply.

From there I was able to buzz out the proper pin on one of those unused board mount connectors on the bottom.
And then mount a Raspberry Pi. @Logan_Buchy and @Lukeo I owe you guys one now, I’ll bring it in as soon as possible!
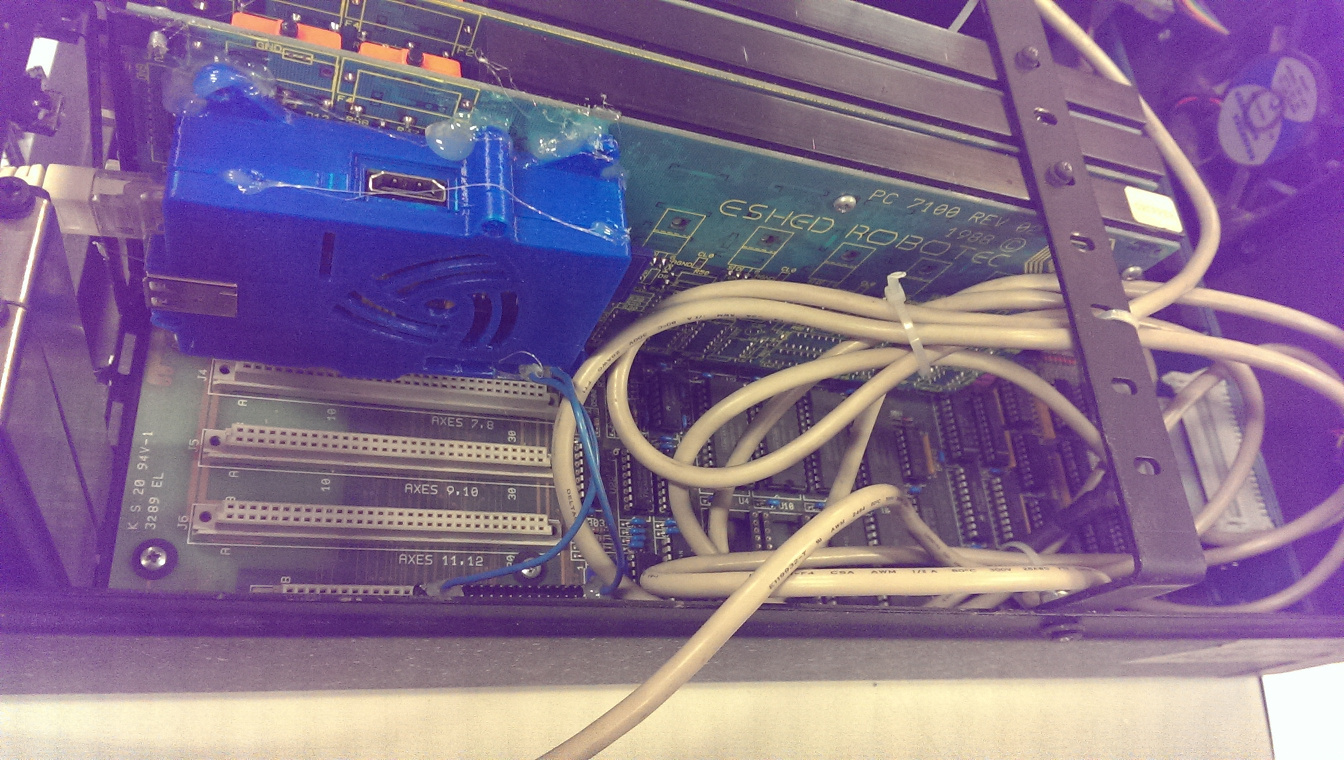
At this point, the RasPi boots up along with the controller, and if you plug an ethernet cable into it, it registers as wocket.vanhack.ca (dunno why) and the credentials are root / dietpi
The serial dongle is at ttyAMA0 I think, and I was trying to get it to work with Minicom, although no luck. The problem could be with my original hacky serial cable fix, using a different dongle, or using the Raspberry Pi. I will have to investigate further!
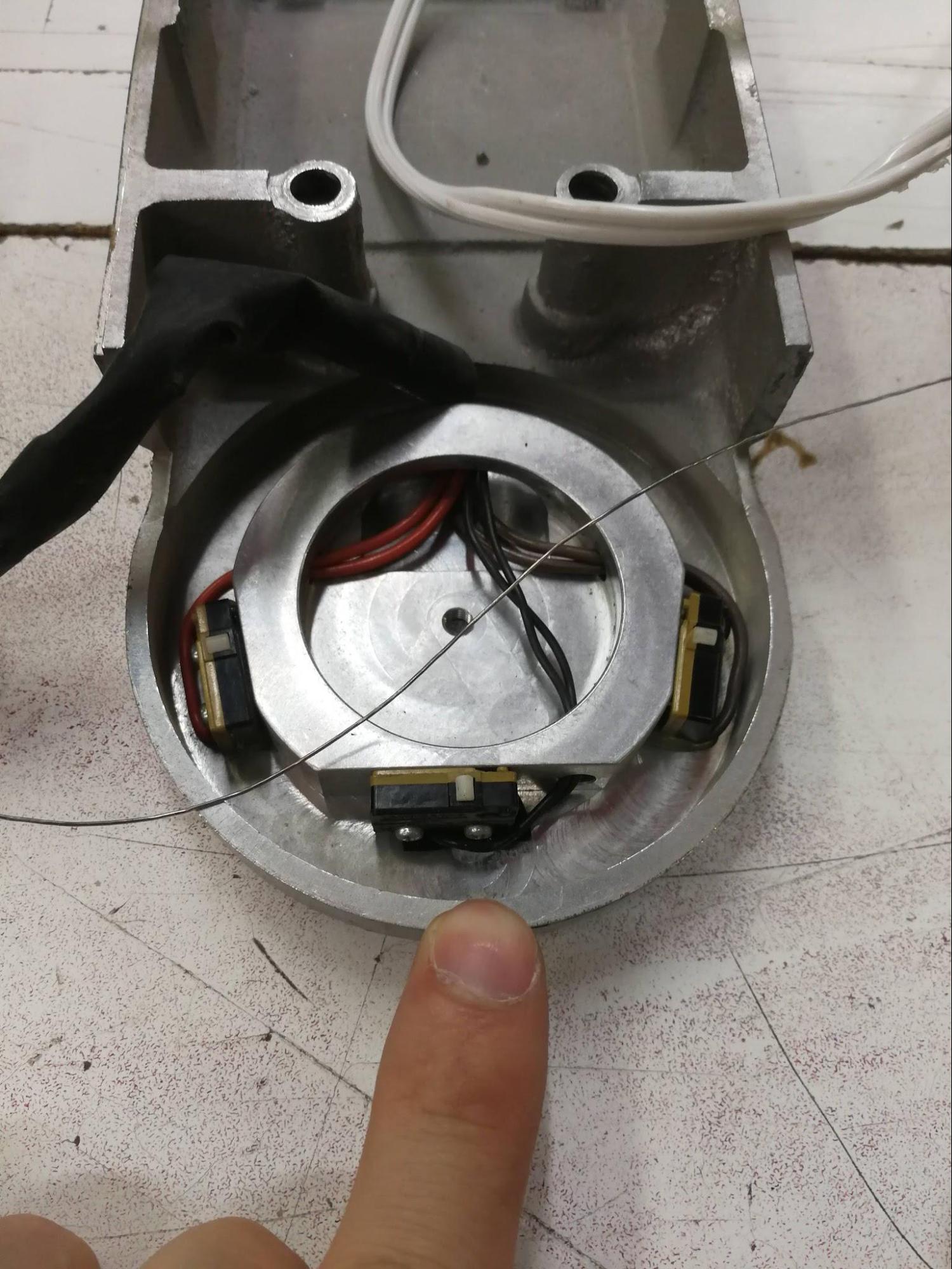
I also didn’t even look at the limit switches.
And that’s where we’re at.
As with any VHS group project, feel free to hack on it and add to this log. I’m not happy until we can reliably get it playing the knife game.