I am commandeering the clear dome from the Art Gallery to house a new robotic tentacle-creature pet for the hack space. They will need an official name (WIP name Squiggles because that’s less syllables than “robotic tentacle-creature pet”), and I will need help designing, learning, building and programming them.
Any and all input, help, supplies, etc. is welcome! This is a community project, but I do want to learn at least a little bit of every part of the project so please let me know if/when you will be working on an aspect of Squiggles so I can come learn things and probably help out.
Some discussion has already happened in What should we build with the Plexi-Dome - an ideas thread but I wanted to make a project thread for future discussion and progression tracking.
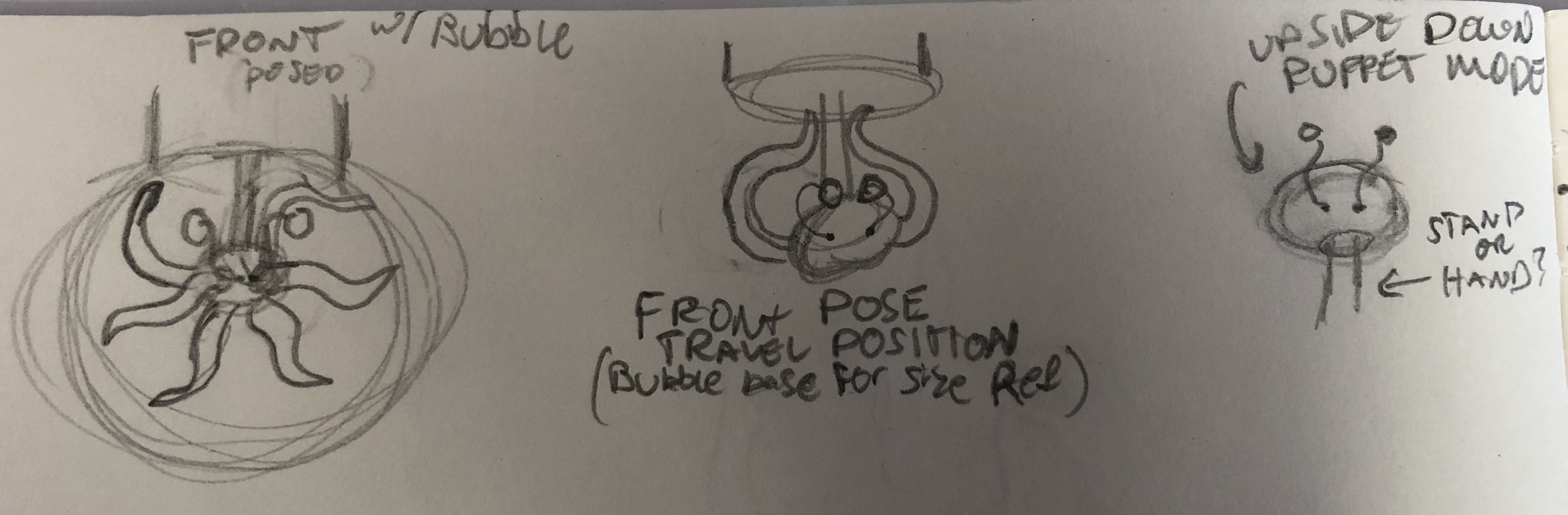
The original design I proposed looks a lot like the Flying Spaghetti Monster according to all the feedback I’ve received and while that’s cool and all I would like to steer Squiggles towards a less recognizable figure that it more our own. It was also determined at SHHH42 that it would be cool to have Squiggles and their home mounted on the ceiling, so the design has been modified a little and flipped upside down.
I would also like to make it so we can take squiggles off of the ceiling and hold them like a puppet or have them on a stand effectively upside-down from their normal position.
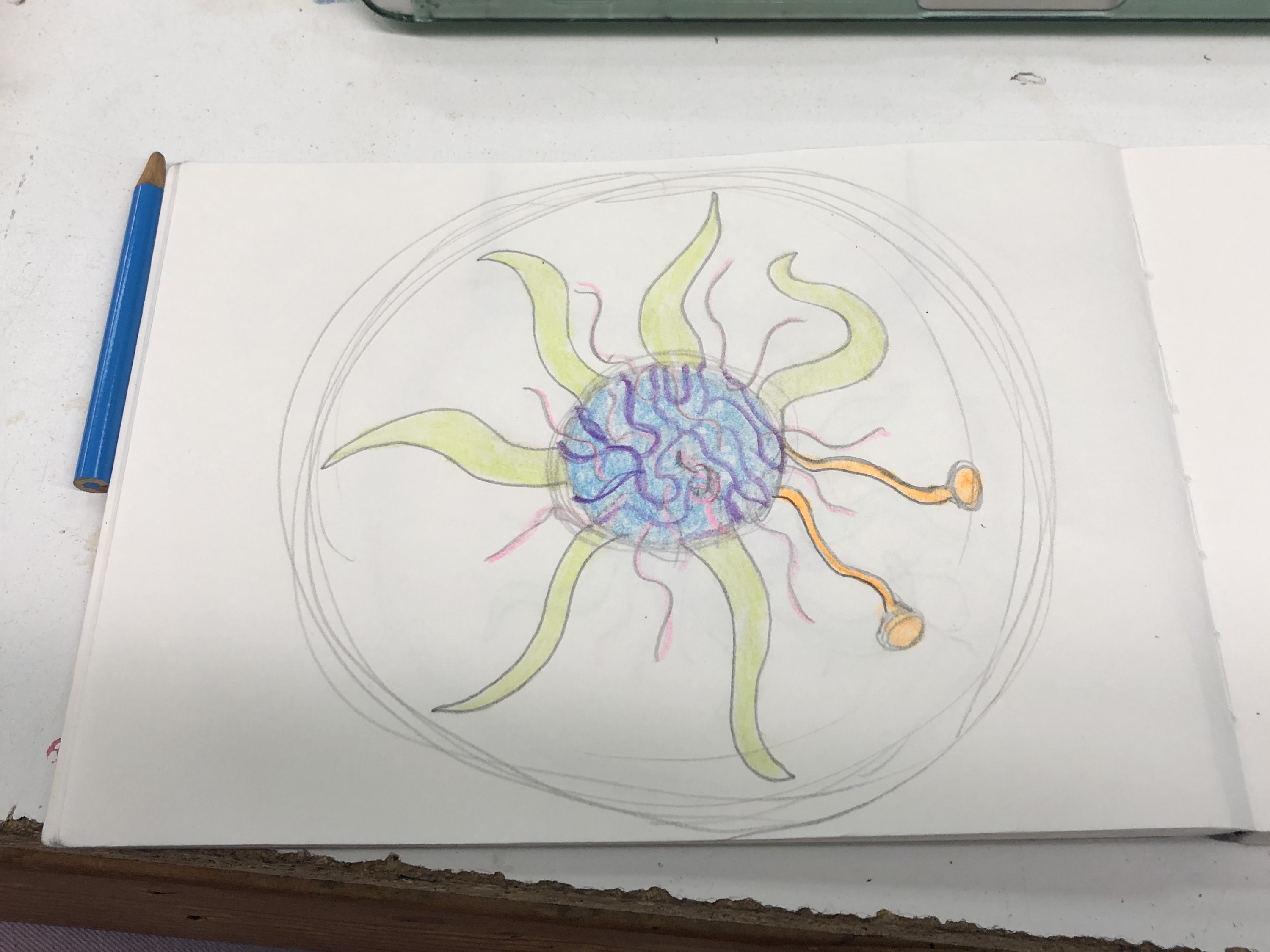
This is a color-coded worm’s-eye view of Squiggles if all the tentacles are more or less straight out to the sides. The colors are arbitrary for identification and discussion of components, not the proposed physical design colors. This is also not to scale, but just a rough approximation of proportions for concept development.
The green things are two-stage tentacles that will almost reach the dome wall but not quite when straight. They will ideally have lights along them that change colors.
The orange tubes are eye stalks that will also move around, possibly looking around with a motion sensor at people? The eyeballs at the end of the stalks will be lights or screens or something cool that can change color and shine and stuff.
The pink bits are curly stalks that will wiggle and twist somehow. Not necessarily light up or 100% controlled motion, but still moving around a bit.
The blue oval is the main housing of everything. A sturdy structure with cloth or something softer over it to make it look more organic.
The purple strips are paths of lights that will glow and pulse different colors within the main housing.
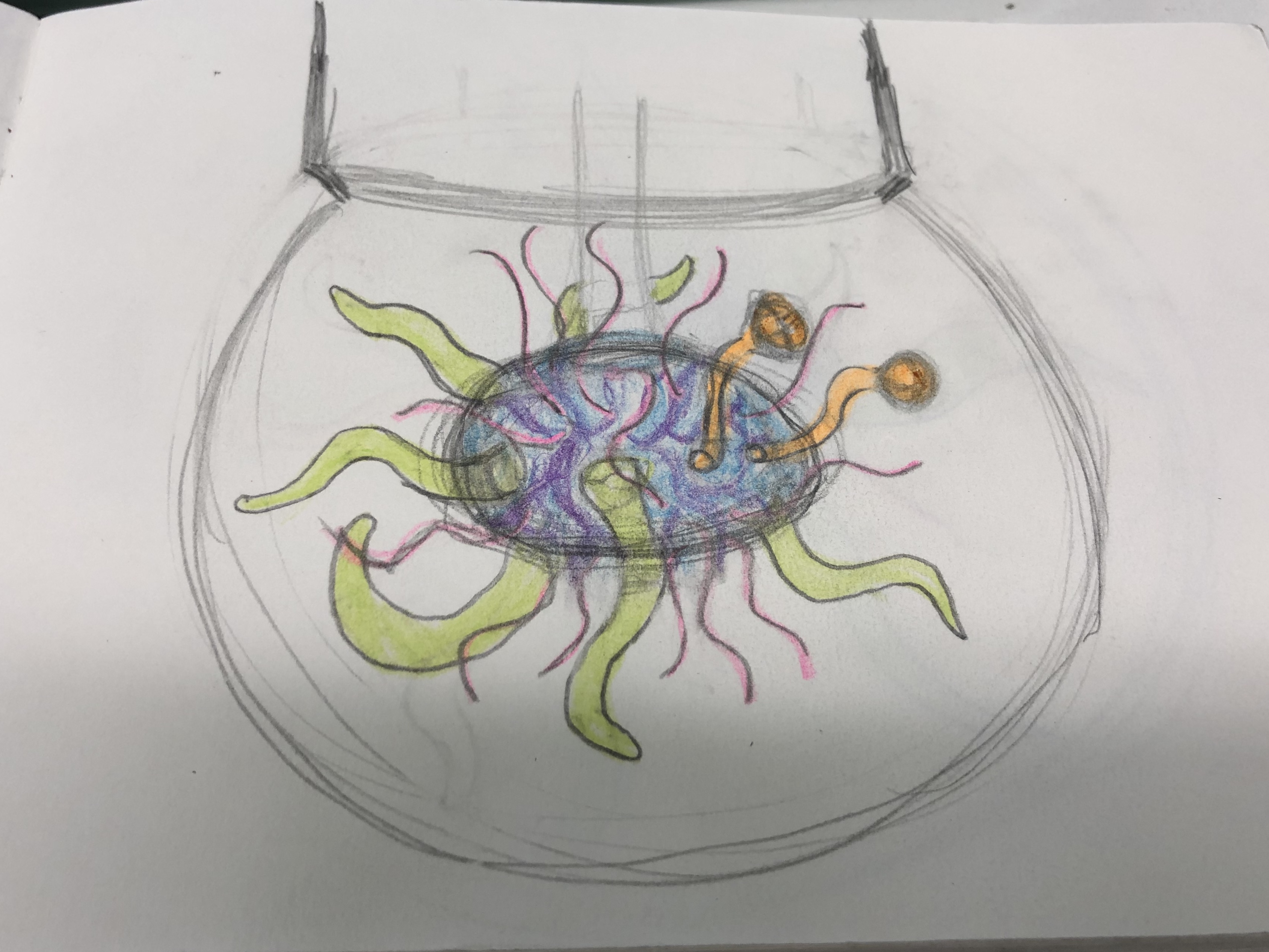
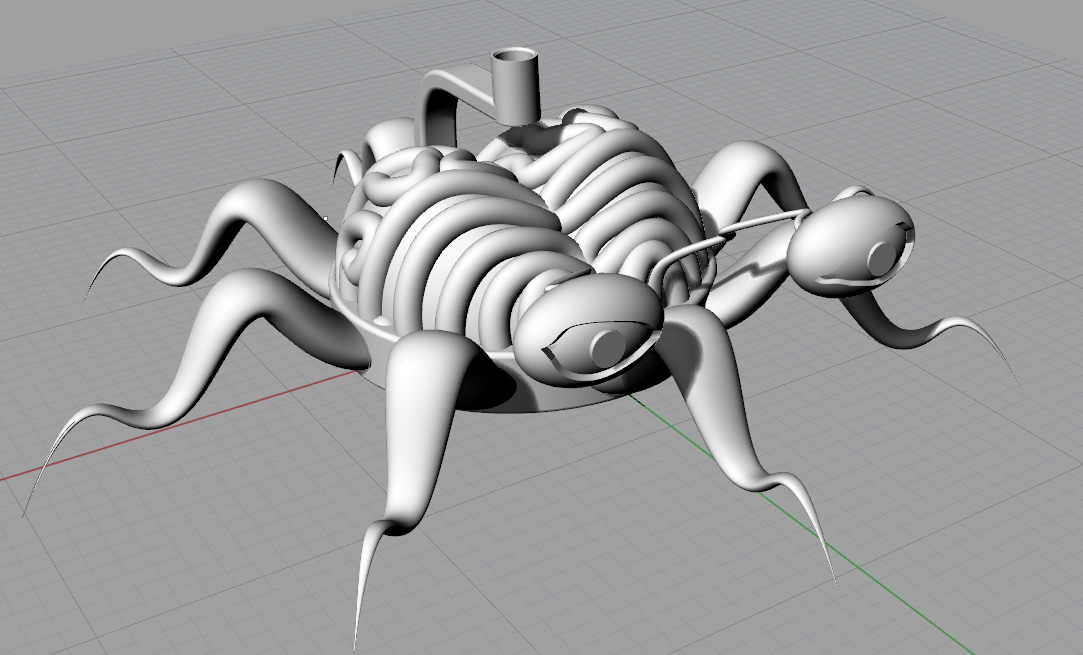
Here’s a side view of a 3/4ths-ish rotation of the current design
Able to be flipped upside down (or right side up) without breaking things
Able to be controlled by wall or battery power (for events)
Wireless controls for some behaviors, ambient movements when not being controlled
Eye stalks able to swivel and pivot to look around and at people and motion
A bunch of wiggle strands curling and squirming. Possibly crochet swirls controlled by a wire to make them curlier and softer?
Six (6) two-stage tentacles for cool wiggly arm motion
Tentacles able to be lightly bumped (like if someone brushes against them at an event if Squiggles is out of their housing) and have enough give to not break and also be moved (not too solid), but enough tension to maintain shape? (I know very little about building tentacles, so idk if this is even a big concern?)
ALL of the lights. All of them. Lots of lights and changing colors.
Overall the goal is cool and technical and slightly-off-putting if it weren’t so mesmerizing and fun, but also oddly cute. (I think my current drawings are missing the cute mark a little)
Please discuss and suggest features and methods of making them real!
Yes! I will be at VHS tonight, and I want to measure the dome and figure out proportions at the very least. My work schedule is a bunch of overtime right now but I’m making time for designing.
I also need a tote to store Squiggles’ in-progress components etc. in, I don’t have one at the space yet.
We also have some measurements. The circumference of the globe is about 114”, give or take 0.5” for measuring-rope stretchiness. This puts the diameter of the globe at about 36”.
The circumference of the opening is about 80”, so the opening is roughly 25” (rounded down for clearance).
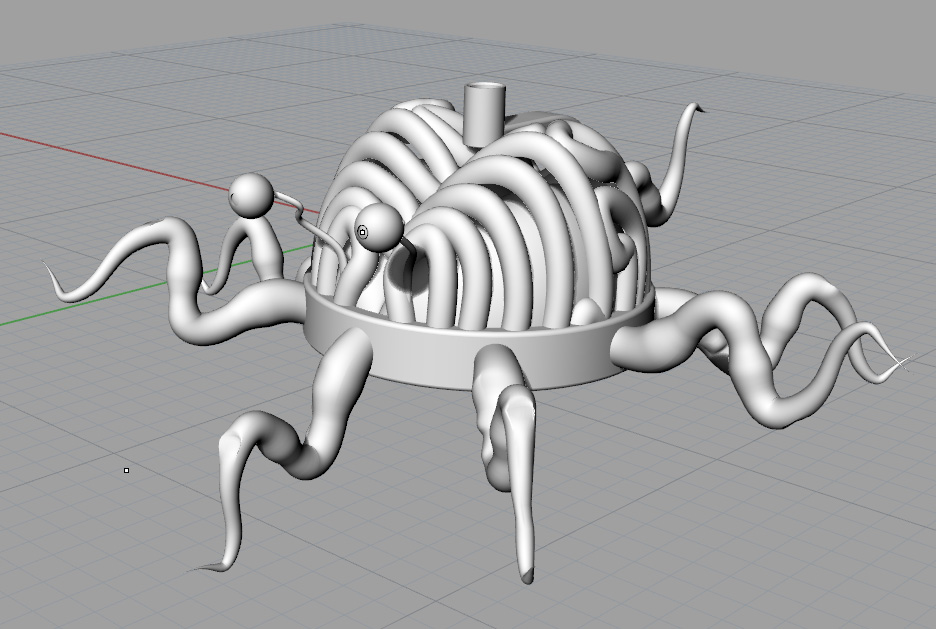
I am planning to go to the space tonight to build a rough model so I can better visualize proportions for the brain/body and tentacles in comparison to the globe and eachother.
We also decided that it would be a lot easier and better aesthetically to not flip them upside down, but to have a closeable hole in the top for mounting on the ceiling and a hidden hole in the bottom for puppet holding and mounting at events.
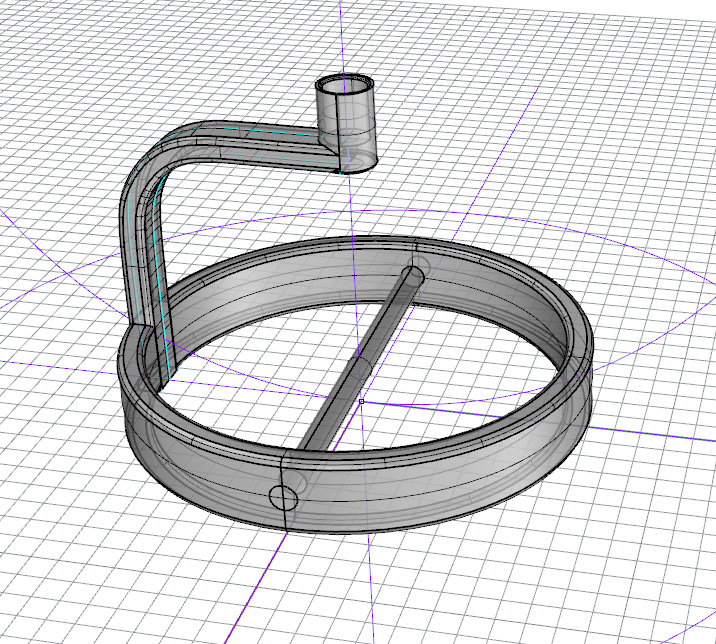
Ok so I’m having trouble getting a copy of rhino to work on my computer
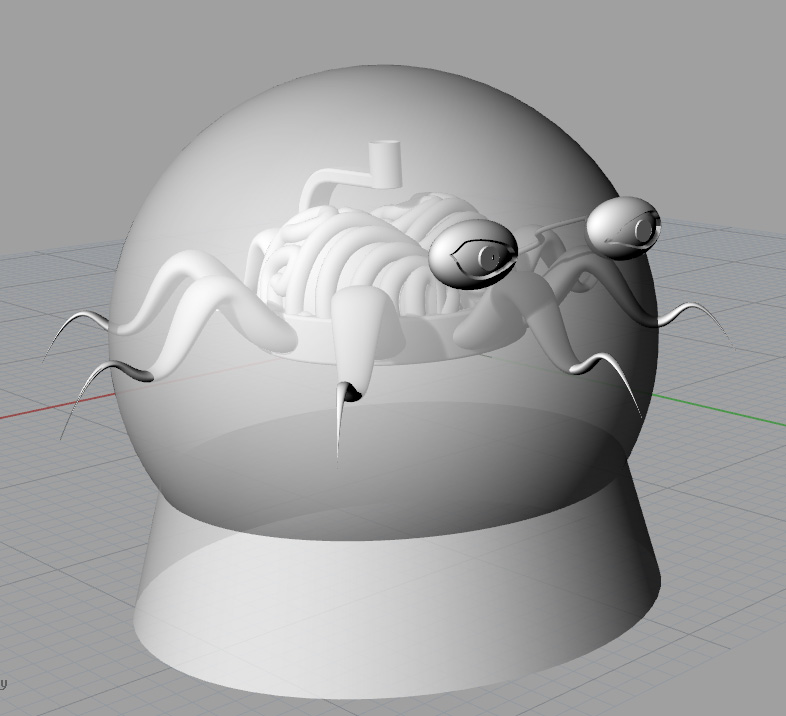
But I have a trial version at work so I mocked up the chassis we were talking about where to top can screw in and the bottom could be a puppet
And here’s a shot of a more complete model
I’m still working on the brain bit but we’re getting the idea right
This is all scaled and it’s a tad larger than the. Globe space so we may want to drink it
looks hilarious. luvin it. you could always just pull the eyes in and press the tenticles up against the sphere . scale of the body compared to the sphere is nice.
What are the dimensions on your model? I have everything measured out on my Maya version, I can post them whenever my computer decided to finish updating.
I’m concerned about the space inside the brain, because that needs to fit all the servos and wiring and lighting connections and stuff, but I think we won’t know how much room all that will take until we actually get supplies to start building.
I think the tentacles are going to be the first step for building so we can get the space needed for the servos figured out.
I’m trying to work out controls for the various elements.
(I’m abbreviating Codename: Squiggles to CN:S for ease of typing. )
I want everything to be able to be controlled via bluetooth (I think) from a wall panel for different modes.
Passive Mode: when nobody is directly interacting but CN:S is still moving around of their own accord
Active Mode: when people are around and CN:S is interacting with them based on input from the wall panel for moods and lighting and such
Controlled Mode: when someone is using a controller (like an xbox one) to move the eyes and maybe control tentacle speed and direction
Sentry Mode: low power mode that will save energy and not move around as much, but also switch back to passive mode if movement is sensed
Within the main body of CN:S we need control for
at least 12 servos for the tentacles (2 per tentacle)
lights in the tentacles
lights in the main body
motion for the jellyfish tendrils
the eyes, however those are going to be done (I’m still unsure about this)
I think it would be cool to have the whole body able to rotate to focus on movement in the room on Sentry Mode, but idk how feasible that is.
Am I right in thinking a Raspberry Pi or something would be better than a microcontroller for all of this? I’ve only ever worked with Arduino-type things but I feel like this is more complex than an Arduino can handle.