Hello! I am trying to invent something. I have some experience with electronics and motors, but I need more help.
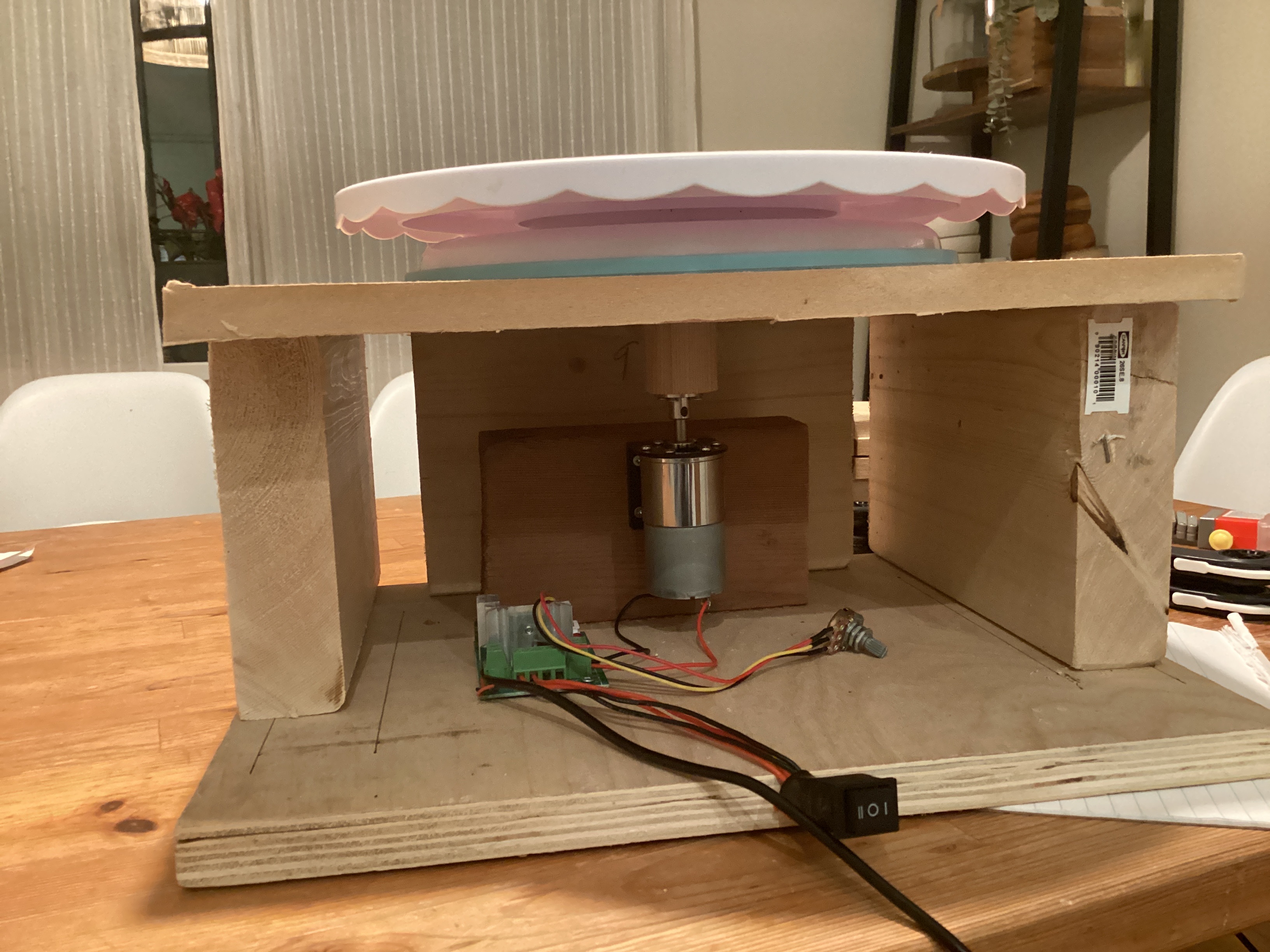
I am inventing an electric cake turn table. My wife decorates cakes and she uses a circular turn table to put on the frosting and smooth it. I would like to put a motor on it.
I have built a prototype and I think that the motor isn’t strong enough. I don’t know how to go about finding the right one. My wife was happy with a motor that’s about 30 rpm. The motor is 2.2 Nm. I think that’s about 7 W. The problem was when it slowed down the power was very weak. I’m wondering how to make it function when it’s going slower than 30 rpm.
I am thinking about adding a 2 speed gear box - this seems tricky.
I am thinking about a stronger motor
I want to add a foot pedal to control the speed. I’m going to get a guitar Wah Wah pedal and hack.
I am wondering whether DC or AC is better in the long run.
Right now I’m most confused about where to buy motors. The first ones I bought were from Amazon - a company called geartisan. Finding the Torque or power rating was frustrating.
For speed control you should be fine doing that electronically rather than mechanically, as long as the motor and controller can handle the load… It’s possible you’re current-limited by the speed controller you’re using now, or even the input power supply; you could try driving the same motor directly from a DC variable power supply (e.g. 30V/10A ones are commonplace) and seeing if it performs better. You should be able to get that motor’s gear ratio and voltage/current specs from the spec sheet or product listing.
There are probably a few dozen DC gear motors gathering dust at the space if you want to try a few different options.
That is interesting to think about the controller perhaps being the issue.
I think I will come in! It will be my first time. My friend recommended this space. He used to come in to build paintball guns. I think VanHack space led him to change his career - he was a visual artist before, he’s an engineer now!
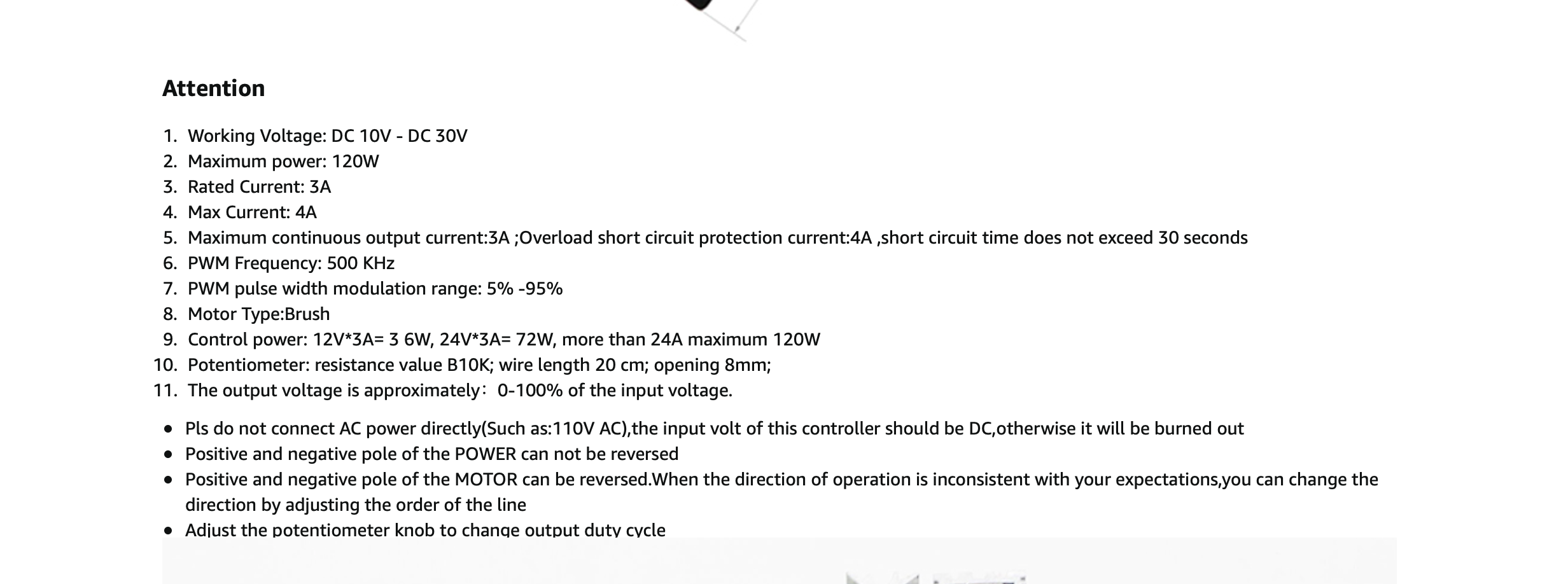
DC motors, with naive control, are essentially torque controlled. This is basically because they have no way to set their ‘natural’ speed (which is typically quite high, 1000s of RPM); electronic speed control is really achieved by controlling the current (proportional to torque) to what is required to maintain a desired speed. In a system like yours, where the steady state torque is ‘not much’, it will be easily disturbed from its set speed by load changes. There are some fundamental issues that start cropping up at low speeds that are kind of unavoidable with a brushed DC motor though, so they’ll always be harder to run at very low speeds. This will be even worse if your control method is setting a fixed voltage instead of current. What kind of controller are you using?
There are a few alternative approaches you can take here. In my opinion approximate order of complexity for a beginner:
Build some mechanical advantage into your existing system. It’s still going to have the same fundamental issue, but it will mitigate it. A belt drive is probably the easiest way to achieve this. You can find appropriate timing belts and pulleys from 3D printer suppliers. Should be pretty easy to retrofit say a 16T:80T gear drive with cheap parts from 3D printers for a 5x increase in torque. Or you can just fabricobble something from a rubber belt and wood or whatever you have on hand.
Use a DC gear motor with a more appropriate gear ratio. These are common and cheap, and looks like it might be what you’re using already, but for your low speeds the gear ratio might be too low. You might try scrounging a wiper motor (from a car), these are typically ~100rpm at 12V, with current control this is probably fairly strong at 30rpm. If you use a motor with the right gear ratio, I think it’ll probably be okay for the application, but any DC motor solution without feedback will have somewhat load-dependent speed, so if the increased load from ‘working’ the cake is a lot, it might still not be good enough. Probably kinda noisy too.
Use a stepper motor. These are commonly used in 3d printers and other systems, maintain their torque down to a standstill, and accurate speed control is relatively easily achieved. They can be a bit noisy, but with modern controllers and at a constant speed it is probably not that bad. You can scrounge these from old printers, or buy them from 3D printer suppliers. I rank this as #3 because it will probably require some electronics tinkering to build a driver with an Arduino and driver chip from a 3D printer, unless you want to buy a $100 constant speed driver.
Use DC motor with closed-loop control. This will require an encoder on the motor and more complicated driver, but might work with the rest of your existing stuff. It might also require some mechanical advantage though, running a DC motor at 30rpm is probably not feasible without a gear or belt reduction (though I think your motor probably has this already). There are some off-the-shelf options for this kind of control, you can find them at robotics / tinkering shops.
Use a BLDC. Like steppers, these can run at low speed and high torque, however they have the most difficult drive requirements. The controller needs to know the position of the rotor at all times; at high speed this is achieved by monitoring the back-EMF from the motor, but this starts to fall apart at slow speeds. At your speeds this probably means that high-resolution feedback would be required, so might not work at all. You could use a geared version (or maybe belt drive is enough), though, and this should give relatively quiet operation and good speed control even with load changes. I’m not sure where these can be scrounged from, but an ESC for a drone etc. will work, though the motors from a drone are probably not well optimized for this use case.
A good single-source for lots of types of motors and drivers is stepperonline.com.
Thanks for ktims for all the suggestions. I was considering a NEMA motor. I think I’ll need to rebuild some of the turntable to fit a different size motor, that’s ok. I’m not sure about the controller stuff and will have to look into it.
To clarify - my wife uses the cake turn table at a range of speeds. 30 rpm was about the top speed. I was thinking of setting it at 40 rpm as a top speed. She also slows it down - even to 5-10 rpm. At different parts of the cake decorating she needs it a different speeds.
Help me out understanding option 1, mechanical advantage. My current motor has a max speed of 30 rpm. I think it has some kinda gearbox attached. Are you saying I would get more torque if I had a 120 rpm motor (of the same power) and put a simple belt system on it, than if I had the 30 rpm motor?
I have spoken to one person about DC vs AC before. The guy from Lees electronics. He recommended going DC rather than AC, as it would be more food safe.
First, I will get a 24V power supply and try that.
Second, I have done some looking and learning. Good ole’ youtube. First, on stepper motors - I have never used one of these guys before! Very cool to learn about. It looks like it might be a good solution - the motor can provide more torque at lower speeds. I’m happy to try out the controller stuff.
The stepper motors are amazing - this solution seems overkill for me. We don’t need that much precision or control - just the ability to control the speed up and down.
I also learned about encoders. This is also very interesting, but also overkill. From what I gather, this solution gives more control and precision. Does it give more torque? Maybe it does, but I didn’t understand.
If its a 12V motor don’t use a 24V power supply as you may burn out the motor… You need a 12V power supply with a higher amperage output than what you appear to be using…
That DC adapter doesn’t look very beefy, it’ll have a sticker or embossed section that’ll tell you its rated output current. It’s not too hard to find cheap “wall wart” style 12V power supplies that can do 2-5A (i.e. 24-60W).
Your motor’s rated speed of 30 RPM (2 seconds per revolution!) is probably too fast for a cake, so some kind of reduction using a belt or wooden gears or whatever is probably worth a shot. 12RPM (5 seconds per revolution) sounds reasonable to me, a person who has decorated maybe three cakes ever.
Here’s a quick n’ dirty design that’ll get you a 2.5x reduction from 30 to 12 RPM – uncheck the “Internal gear” checkbox to see a more traditional setup for the bigger gear, which would probably be easier to make on a bandsaw, but might not be as space-efficient.
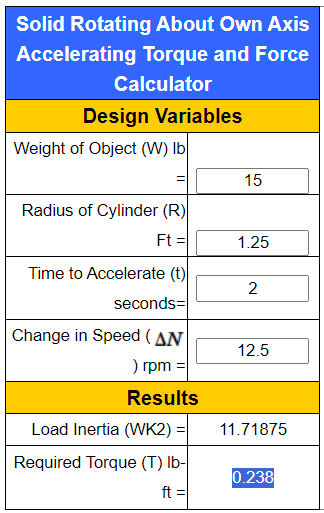
I found this calculator and I feel like your motor rated for 1.1Nm might be fine for 0.238 lbft = 0.322 Nm as long as you power it correctly.
First - the current power supply is 1 A. I see I can get something 2.5 A pretty easy from amazon.
Second, we did a bit of testing my wife’s cake decorating speeds. Her top speed was 30 rpm - the last few passes she does fairly quickly. She’d be happy with 20 or 25 I think. Normally she’s using it more slowly - 10-15 rpm. Mmmm… I’ll try the new power first before changing the gears.
Third - I just put a foot pedal on - we want to control the speed using the feet. I hacked a guitar pedal. A Cry Baby Wah Wah. The potentiometer on the controller is 100k (ohms I think) and the potentiometer on the Cry Baby is also 100k! Awesome.
I wired the guitar pedal to the control and got it to work. However, there is a range issue. The pedal really lacks precision control. The pedal has about an inch of up/down control. I took a photo of the side profile.
From about 1”–0.5” the potentiometer is outputting nothing. It starts going at 0.5” and by 0.25” it’s at full speed. Then full speed until all the way down… don’t know if that makes sense. So there is very little control of the speed. I realize its how the potentiometer was built.
It’s probably log taper (audio) potentiometer, while your controller uses a linear one.
You can modify the taper with some resistors, but it’s probably easier to just swap the pot in the pedal with a linear one, unless it’s weird mechanically.
+1 that your power supply is a problem with the current setup.