Thought it would be good but perhaps needed to be at the end of a tentacle like this guy makes: Stan Winston School of Character Arts…
This is a pay site but well worth the $$
I have yet to start on this project (nor do I really know what the end result will be) but wondered if anyone else is interested in such a thing?
Heh I’m liking this. I have some fun ultrasonic sensors we could hook up so the eyes follow you. They could stare at you until you put money in the VHs donation bin.
My wanted end result would be a stand alone tentacle with the eye at the end… It will have the ability to react to people around it (ir or ultrasonic sensors) and react both in moving the tentacle and the action of the eye image…
Eventually it could even have a voice or sounds…
I played around with some tentacle mechanisms earlier this year. Was one of the things that prompted me to join the hackspace. Would definitely be keen to be part of something.
I didn’t get to the point of a full tentacle - I was primarily prototyping with some mechanisms in cardboard. I tried to find a picture, but unfortunately they hit the recycling bin a couple of days ago.
The designer of that particular one has posted the drawings, bill of materials, and even construction plans online. (And done a pretty awesome job - wow.) Would need to choose an alternative material to Delrin to do the laser cutting at VHS, and replace the hand controls with some beefy servos. Probably need to modify the vertebra as well in order to accommodate cables for the eye.
I want it to be able to handle the weight of the OLED screen (for the eye) and it’s respective housing at the end…
Probably no longer than 18"
I’m thinking if 1" to 1.5" aluminum rod for the vertebra…
Cut into say 3/8" slices…
Then machined to leave a 1/8" thick vertebra with a 1/4" collar to connect to the center spine…
Then additional drilling to make room for control cables and general weight reduction…
Though not sure what issues with the cable rubbing on the aluminum will present in the long run…
For the spine I may try a local source for speedo cable (though based on that same hackaday article it may not be sturdy enough) so I have ordered some of the thicker cable (as recommended in the same article) from AliExpress…
Not sure what sort of servo it will require…
May end up trying to gear down a stepper motor…
That video is interesting, to bad it didn’t have more details on the construction…
So I was leaning towards using Aluminum rod stock (say 1.5") to make the vertebra but was wondering about the actualization cables (probably 1/32 or 3/64 aircraft cable) rubbing against the aluminum and getting too much friction…
And it might be kinda pricey… (Though you don’t need much)
It looks much better and doesn’t strobe in person…
The OLED display is pretty pricey ($56) but the code also works with the TFT display ($20) but I couldn’t find any in stock (and Digikey had the OLED version that got delivered in 1 day)…
However someone managed to make a cheapy clone TFT display work like this one: https://www.aliexpress.com/item/J34-F85-Free-Shipping-1-44-Serial-LCD-Display-128-128-SPI-TFT-Color-Screen-With/32599757275.html
So I ordered one…
When I get it (6 months from now) I’ll see how it compares…
My plan will be to mount the display and the Teensy on a 2.5" round PCB and house it in some saucer shaped thing… This will be on the end of the tentacle…
Now to find the acrylic lense and some sort of housing…
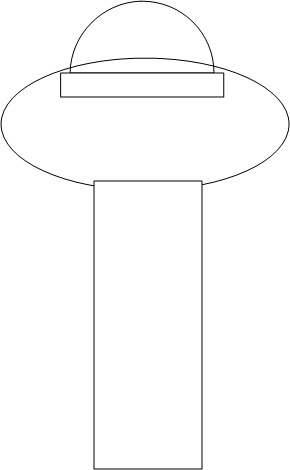
Below is a rough idea of the eye housing…
The half sphere lense is 1.5"
Below it is the OLED board
It will be house in something kinda saucer shaped…
Then the tentacle will attach to the bottom…
Also thinking of putting a ring or two of WS2811 pixels perhaps on the edge of the saucer housing…
Here is a rough design of the proposed control system
I’ll use a Teensy in the eye housing to drive the OLED display. The eye image movement will be able to act autonomously or controlled via the Teensy in the base. Also the eyelid movement is controllable. Use a LDR (light dependant resistor) the Eye Teensy automatically controls the iris size based on the ambient light.
The Teensy in the base will drive the 4 steppers (hopefully I can get some cheap steppers that have the required power) to move both stages of the tentacle. This Teensy will also use various sensors (microphone, IR distance and/or ultrasonic distance) to detect changes in the environments and react somehow. Hopefully to track and watch people. It will also drive a band of WS2811 pixels around the eye housing.