
Sixi 3 is the third generation of my robot arm obsession. Sixi 2 was 1300 parts in 250 types. Sixi 3 is 250 parts in <30 types. By using a modular design I save a ton of work. If you want to make and are worried about COVID-19 then telemanipulation is your new friend and so is Sixi 3.
modular FTW
Because it’s modular the pieces can be used as a 5 axis arm (as photographed) or 6 axis (sim pic) or recombined to make other robots. The gearbox is a 105:1 harmonic gearbox on a stepper motor. All stepper motors in the robot arm are driven of a RUMBA board, the same one I’ve been using in Makelangelo plotters for the last decade. The firmware is Marlin, the 3D printer firmware common in many brands. Robot Overlord knows how to talk to Marlin, so you can drive it directly to build a program, then play that back over and over.
the gearbox

I’m pretty chuffed with this design. the gearbox is made by some american friends in a secret SLA method. the printed parts have almost zero support material and are designed for injection molding. The back piece can be reversed if needed, and there’s a PCB in the works that will integrate CAN bus, high resolution absolute position sensing, and with the through-hole in the gearbox the wires can be daisy-chained - meaning I can hide all the cables without creating a maintenance headache. The PCB brain is an STM32F103. The angle sensor is an IPS2200.
the app
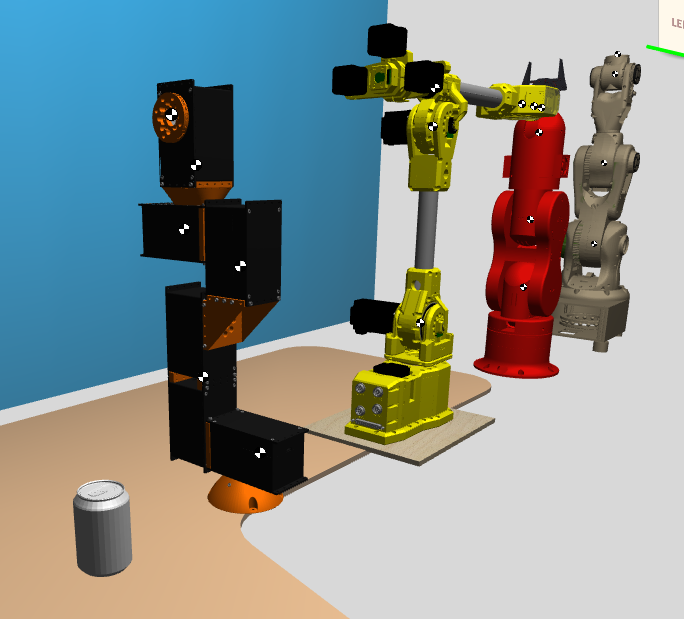
This is a shot from the Robot Overlord simulator, showing sixi 3, sixi 2, THOR, and Mantis (the last two not mine). I have Alpha Secondary students doing work experience (from home) adding more based on my recent posts on my blog. soda can for size.
Last week’s post was about how to import an arm into the app. Tomorrow’s scheduled post is about how to modify Marlin to run an arm. With these forces combined you’ll have everything you need to build your own arm design and skip the hard make-software part.
video
Ok, now for the moving picture stuff. I’m sorry I suck at video. The first is how to put a gearbox together.

This one is about how to use the app to move around and demos a simple pick & place. Turns out one of the gearboxes was wired backward AND it was 2x the normal steps (so it moved half as much).

what’s next
I’m looking to make sweet demos with it to show off the potential and then attract more users, starting with “open and pour a drink”. Turns out making a tool that goes on the end is almost as hard as making the arm! The art of holding parts on a jig so the robot can do a repeatable job is also very tricky. Fun challenges for anyone who loves puzzles.
Sixi 2 had a system to be driven via a Raspberry Pi with a web camera. That’s great, but only one camera means no depth of field. If I have only one camera on a Pi I’d like to move it with the arm and use OpenCV to generate a point cloud of the environment.
One day soon I hope to finish integrating ODE4J into the app. Then we’ll have dynamics, be able to grab stuff with a claw on the arm, and so forth.