So I finally got a bit further on this project…
Only 423 days later (hmmm… quicker than normal)
Here is a video of a test routine:
Now just has to pair this code with the previous code grabbing the space status…
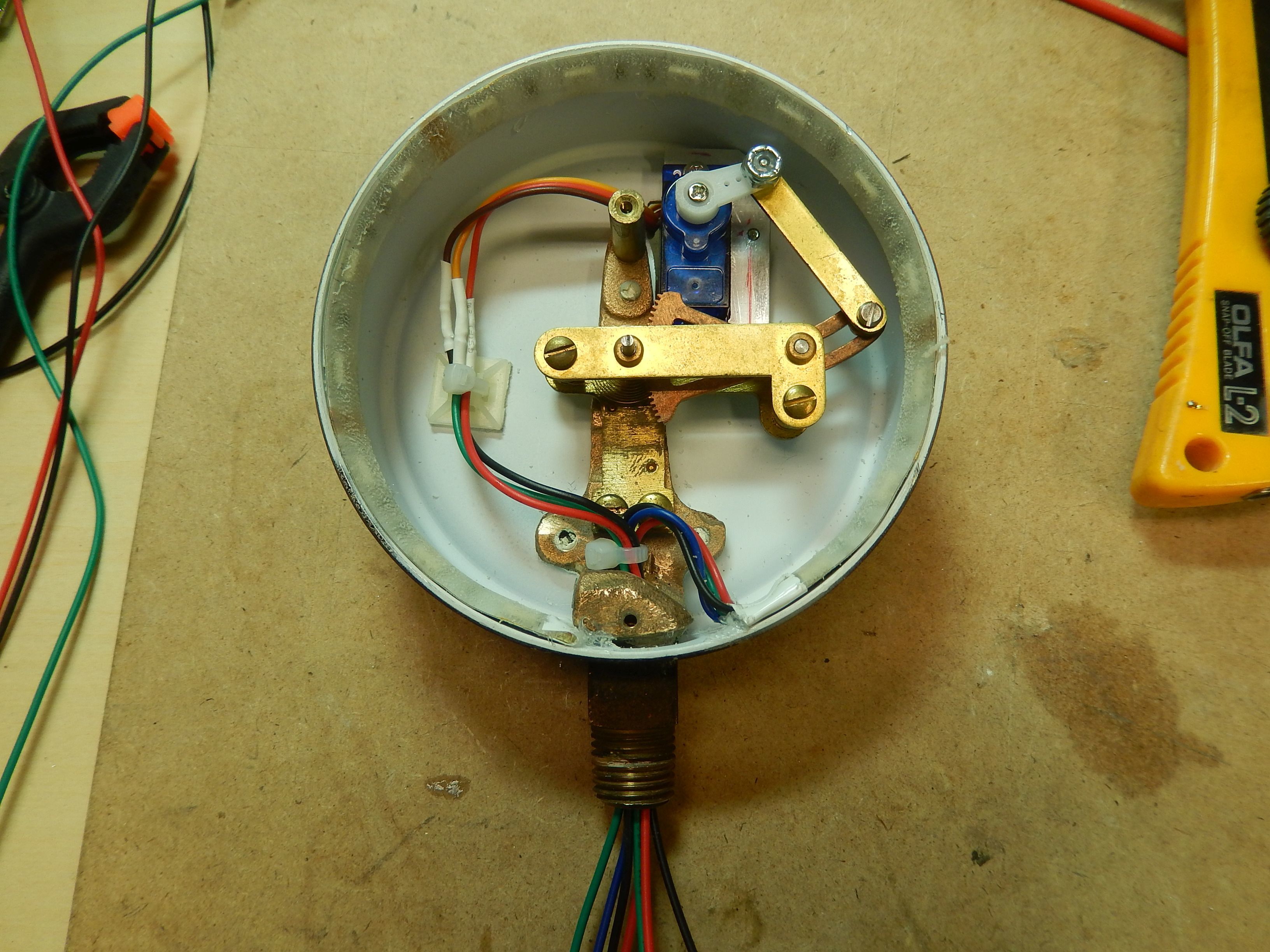
One thing I have noticed is that the cheapy AliExpress servos I am using are pretty crappy…
You get what you pay for…
They work but I find that between power cycles the server tends to stop at different positions for the same pulse width…
Lets say a width of 1460 uS is center. Once it is rebooted the servo now needs a pulse width of 1462 uS to get to the same position… Due to the gearing of the gauge (there is only a 340 uS range between the open and closed positions) a small change is noticeable…
I’ll run this one till it burns out and then try a better one…
The LED color for the Not Sure position is suppose to be yellow but it shows more white in the video…
Wow, I forgot about this project. It looks awesome!
<bikeshed>
Not a bug.
This thing is beautifully analog, and if your servos hit the exact mark every time you’d have to add a bit of randomness in the software to get the feature you’re getting here for free. The only concession I’d make if the positioning bothered me is an undocumented trim pot on the case that you could use to zero the gauge out. That’s how old analog multimeters did it, right? (granted they weren’t pots but visually the effect should work)
</bikeshed>
I have thought about adding a routine that kicks off randomly to move the needle a little bit to make it look more analogish…
But hey…
That’s a project for next year…