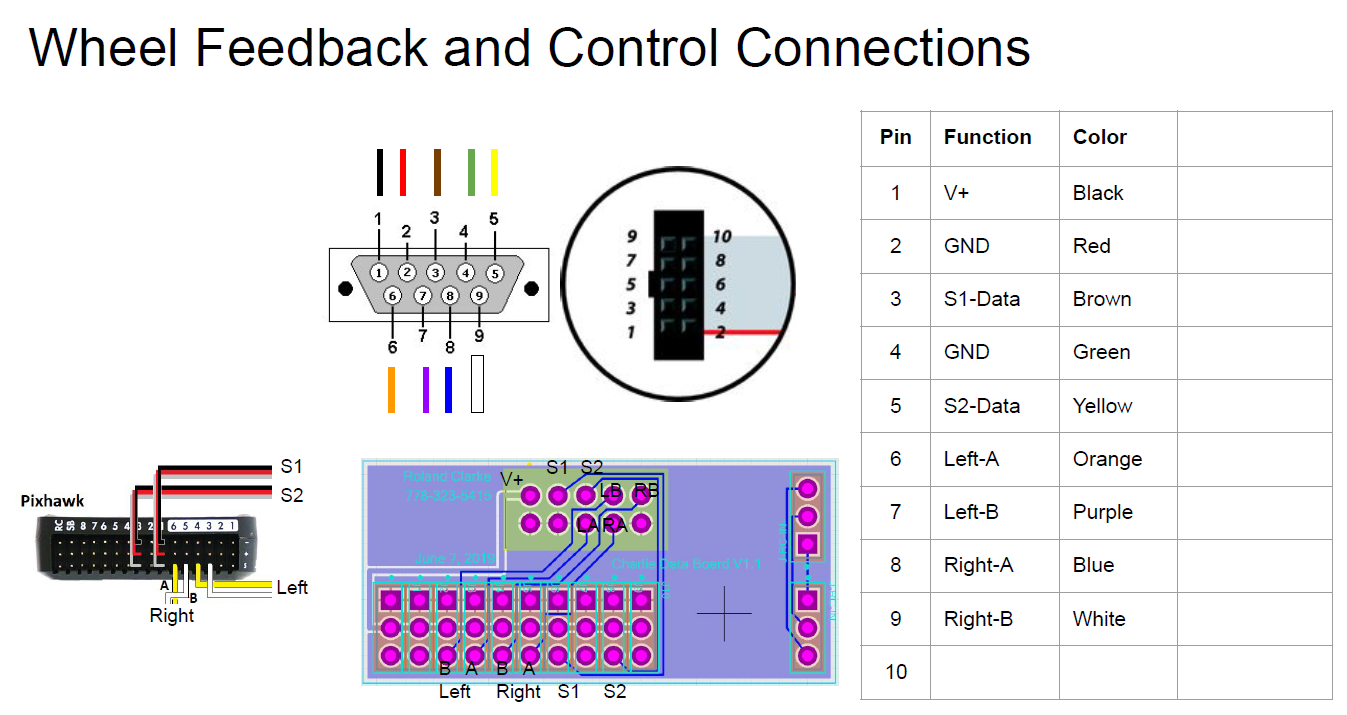
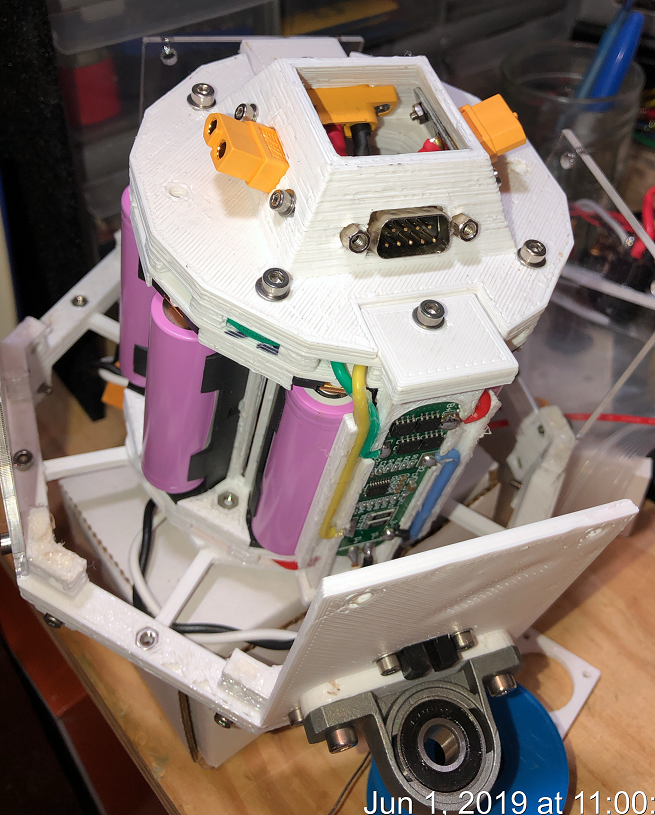
Mapping out the connections for the DB9 to carry all the balance brain signals down to the wheels, and the wheel encoders to send them back up to the balance brain. Hopefully now assembly and disassembly will be simple and easy(er).
5 Likes
The complexity of this project is spiraling out of control, I love it
I’m definitely swimming in crazy. Just hoping parts of it get working at some level. ![]()
3 Likes

Testing Charlie servos. This is the slowest possible speed. Lots of power, but I am still very afraid of breaking things. Need to keep testing all orientations of the head does not hit anything.
3 Likes
OK. momentousness!! After about an hour or two playing with the NanoPC-T4 (super powerful single board computer), and trying to install openCV and run the demos… Charlie has achieved… FACIAL RECOGNITION!!!
Super cool. Very close to the goal of having Charlie see a face, then move its head to center the face in his field of view, then, of course… ask you your name. ![]()
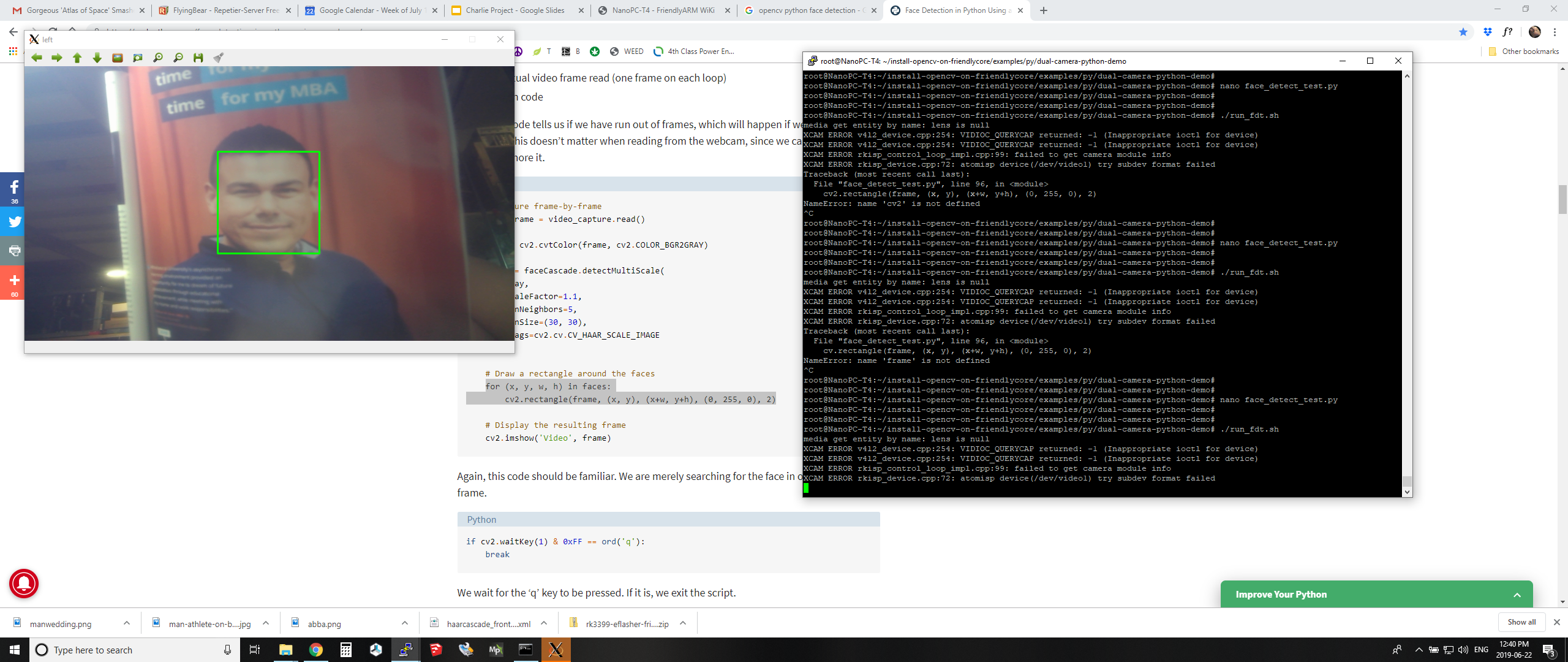
Also, full stereo vision now works. Left eye and Right eye, so Charlie will be using parallax for distance estimation soon!
5 Likes

Charlie balances on his own two wheels for the first time. PID tuning was a bear, but fairly close now…

9 Likes
First full balance test with head attached. Slightly different balance characteristics, but I think that Charlie did great. Lots of work to do. Need to re-arrange the radio controls so that driving around is more manageable. Also need to beef up his main wheel supports, and clean up the wiring around the neck.

8 Likes
This topic was automatically closed 365 days after the last reply. New replies are no longer allowed.