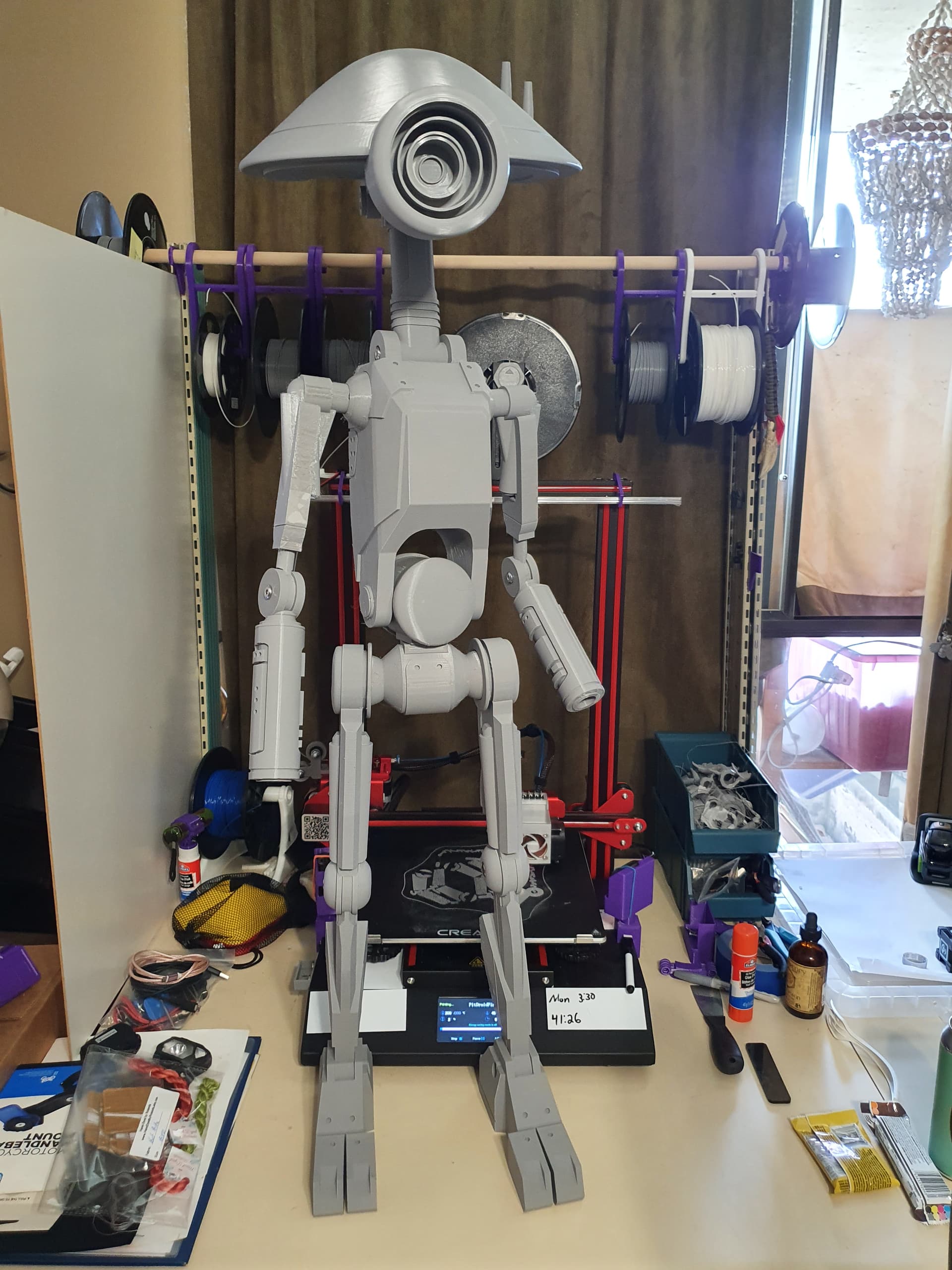
Hey folks it’s been a while since I popped in with anything fun. I’ve started working on motorizing my droid a bit and thought I’d share my progress. Here are a few photos of the static build and a clip of the head movement. I seem to have some binding in the “look right” servo that I need to sort out, but I’m pretty happy with it so far.
I think the current plan for my riding buddy is to tap into the bike’s rear wiring harness with some relays into a raspberry pi; when the brake light is on, have it look around randomly. if a turn signal is on, then look that direction. Maybe add a tilt sensor so it looks the direction I’m leaning/turning the bike. And maybe a wireless button of some flavour (bluetooth likely? not sure) so I can make it wave at the car next to me or something.
All of that is of course dependent on the servos (MG996R’s, and the linkages are an old wire hangar from a drycleaner) being able to hold up to the road wind. I’m hoping with it sitting behind me, I’ll shield most of the wind and it doesn’t rip his head off the first time I hit the road LOL